Overview
Distributed architectures appeared to be the most suitably matched to the
requirements initially established in this thesis; namely, applicable to complex
robots, general enough to be applied to any robot and any task, scalable as to
the number of robot devices (sensors or actuators) as well as in the number of
tasks, able to generate control for an agent with the introduction of the least
amount of external knowledge as possible, and that easy integration into the
controller should be possible when external knowledge is required .
In this research, we present a new view on how to generate modularity, which is compatible with already existing modular approaches like ensembles or mixture of experts. We introduce the concept of modularity at the level of device. This chapter introduces a characterization of the architecture developed for this goal, and shows its performance on a simple Khepera II robot and a complex Aibo robot.
Definitions
We define strategic modularity, as the modular approach that identifies which
sub-tasks are required for an autonomous agent in order to perform a global task.
In contrast, we define tactical modularity as the one that creates the
sub-modules required to implement a given sub-task. In contrast with strategic
modularity, tactical modularity must be implemented for each sub-task by using
the actual devices that make the robot act and sense, these are, its sensors
and actuators. In tactical modularity subdivision is performed at the level
of the physical elements that are actually involved in the accomplishment
of the sub-task.
Method
Tactical modularity should create modularity at the level of the robot
devices which have to implement a required behaviour. It means that, once a sub-behaviour
required for the animat has been decided, tactical modularity has to
implement it using the sensors and actuators at hands. In this paper,
we implement tactical modularity by using our architecture called DAIR
(Distributed Architecture with Internal Representation). This architecture implements
tactical modularity by creating a completely distributed
controller composed of small processing modules around each of the
robot sensor and actuator. We call those modules intelligent hardware
unit (IHU) and its schematics is shown in the following figure.
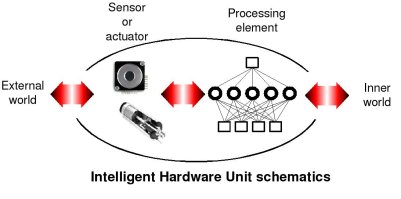
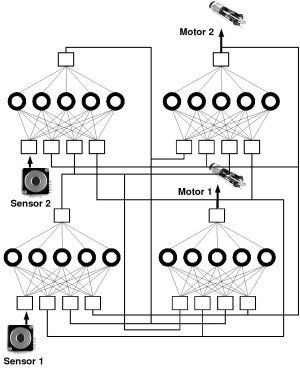
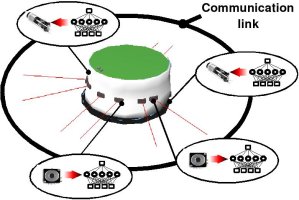
Every IHU is composed of a sensor or an actuator and an artificial neural network that processes the information of its associated device (received sensor information for sensors, commands sent to the actuator for actuators). All IHUs are interconnected to each other in order to be aware of what the other IHUs are doing. The following figure shows its application to a simple robotic system with two sensors and two actuators, and the video shows the results obtained when that architecture is applied to the robot in order to make it orbit around a central object.
Through the use of a neuro-evolutionary algorithm, IHU modules learn how to cooperate and coordinate between them, and how to control its associated element, allowing the whole robot to perform the sub-behaviour required. The algorithm selected is the ESP (Enforced Sub-Populations) by Gómez and Miikkulainen, which has been proved to produce good results on distributed controllers.
Application to complex robot Aibo
The DAIR architecture was tested on complex robot Aibo in different setups:
Related published papers
R. Téllez and C. Angulo, Webots software review, Artificial Life, Volume 13, Issue 3, 2007
L. Holh, R. Téllez, O. Michel and A. Ijspeert, Aibo and Webots: simulation, wireless remote control and controller transfer, Robotics and autonomous systems, Volume 54, Issue 6, pp 472-485, 2006
R. Téllez and C. Angulo, Tactical modularity for evolutionary animats, in the Proceedings of the 9th International Conference of the Catalan Association for Artificial Intelligence, Perpignan, 2006
R. Téllez, C. Angulo and D. Pardo, Completely neural architecture for the general control of autonomous robots , European Symposium on Nature-inspired Smart Information Systems, Albufeira, Portugal, 2005.
R. Téllez and C. Angulo, A distributed architecture for sensory-motor coordination (abstract), in the 3rd International Symposium on Adaptive Motion in Animals and Machines (AMAM'2005), Ilmenau, Germany, 2005.
R. Téllez, C. Angulo and D. Pardo, Highly modular architecture for the general control of autonomous robots , in the 8th International Work-Conference on Artificial Neural Networks (IWANN'2005), Vilanova i la Geltrú, Spain, 2005. Published in Lecture Notes in Computer Science, Volume 3512, p 709, 2005
C. Angulo and R. Téllez, Distributed Intelligence for Smart Home Appliances, Tendencias de la Minería de Datos en España. Red Española de Minería de Datos,Vol: p1-12, 2004
R. Téllez and C. Angulo, Evolving cooperation of simple agents for the control of an autonomous robot, in the Proceedings of the 5th IFAC Symposium on Intelligent Autonomous Vehicles (IAV04), Lisbon, Portugal, 2004.
R. Téllez and C. Angulo, Generando un agente robótico autónomo a partir de la evolución de agentes simples cooperativos (in Spanish), in the Proceedings of the 5th Workshop on Physical Agents (WAF-2004), Girona, Spain, 2004
R. Téllez and C. Angulo, Neuro-evolved agent-based cooperative controller for a behavior-based autonomous robot, in the Proceedings of the First Workshop on Automatics, Vision and Robotics, Barcelona, Spain, 2004